Hi,
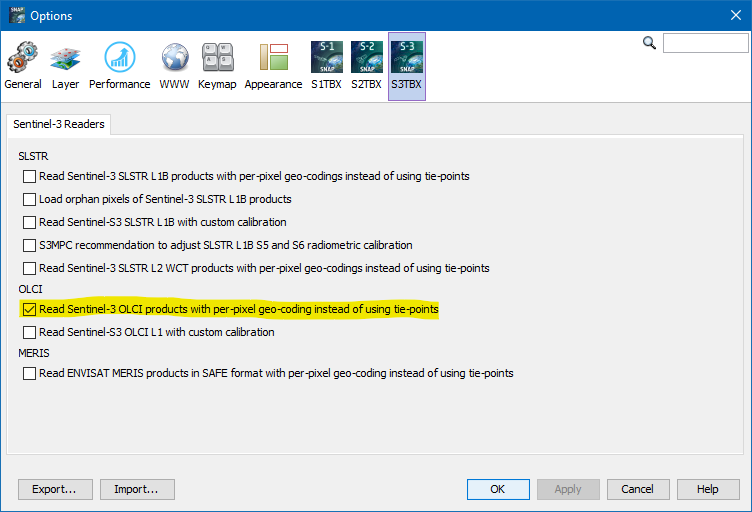
In my work I’ve come to realise that when processing a sentinel 3 L2 OLCI product with C2RCC, the input (L2 product) pixel coordinates are different to the output (C2RCC) pixel coordinates.
As an arbitary example, for a randomly selected pixel in following product (and it’s L2 and C2RCC counterparts) S3A_OL_1_EFR___20160425T221505_20160425T221705_20170928T191525_0119_003_243______MR1_R_NT_002
OL_1_EFR
latitude -34.476915
longitude 172.90746
OL_2_WFR
latitude -34.476915
longitude 172.90746
C2RCC
TP_latitude -34.478897
TP_longitude 172.9085
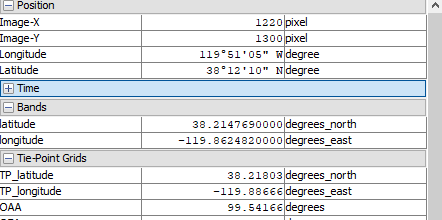
As you can see, the L1 and L2 products have the same coordinates, but the C2RCC coordinates are different. The distance between these two coordinates for this arbitrarily selected pixel in fact turns out to be over 200m.
So; which coordinate should I be using, and why does this difference exist?
Thanks for all the help,
Oli