Hello there!
Could you help me with processing sentinel 1 grd please? Am I doing something wrong ?
I’ve downloaded 2 scenes of same view , same time :
S1A_IW_GRDH_1SDV_20170505T033720_20170505T033749_016441_01B3BE_092C
S1A_IW_GRDH_1SDV_20170517T033720_20170517T033749_016616_01B91A_DDA3
Then I processed them with gpt with graph.xml
graph.xml
<graph id="Graph">
<version>1.0</version>
<node id="Read">
<operator>Read</operator>
<sources/>
<parameters class="com.bc.ceres.binding.dom.XppDomElement">
<file>C:\work\source\manifest.safe</file>
</parameters>
</node>
<node id="Calibration">
<operator>Calibration</operator>
<sources>
<sourceProduct refid="Read"/>
</sources>
<parameters class="com.bc.ceres.binding.dom.XppDomElement">
<sourceBands/>
<auxFile>Product Auxiliary File</auxFile>
<externalAuxFile/>
<outputImageInComplex>false</outputImageInComplex>
<outputImageScaleInDb>false</outputImageScaleInDb>
<createGammaBand>false</createGammaBand>
<createBetaBand>false</createBetaBand>
<selectedPolarisations>VV,VH</selectedPolarisations>
<outputSigmaBand>true</outputSigmaBand>
<outputGammaBand>false</outputGammaBand>
<outputBetaBand>false</outputBetaBand>
</parameters>
</node>
<node id="Terrain-Correction">
<operator>Terrain-Correction</operator>
<sources>
<sourceProduct refid="Write"/>
</sources>
<parameters class="com.bc.ceres.binding.dom.XppDomElement">
<sourceBands>Sigma0_VV,Sigma0_VH</sourceBands>
<demName>SRTM 3Sec</demName>
<externalDEMFile/>
<externalDEMNoDataValue>0.0</externalDEMNoDataValue>
<demResamplingMethod>BILINEAR_INTERPOLATION</demResamplingMethod>
<imgResamplingMethod>BILINEAR_INTERPOLATION</imgResamplingMethod>
<pixelSpacingInMeter>10.0</pixelSpacingInMeter>
<pixelSpacingInDegree>8.983152841195215E-5</pixelSpacingInDegree>
<mapProjection>AUTO:42001</mapProjection>
<nodataValueAtSea>false</nodataValueAtSea>
<saveDEM>false</saveDEM>
<saveLatLon>false</saveLatLon>
<saveIncidenceAngleFromEllipsoid>false</saveIncidenceAngleFromEllipsoid>
<saveLocalIncidenceAngle>false</saveLocalIncidenceAngle>
<saveProjectedLocalIncidenceAngle>false</saveProjectedLocalIncidenceAngle>
<saveSelectedSourceBand>true</saveSelectedSourceBand>
<outputComplex>false</outputComplex>
<applyRadiometricNormalization>false</applyRadiometricNormalization>
<saveSigmaNought>false</saveSigmaNought>
<saveGammaNought>false</saveGammaNought>
<saveBetaNought>false</saveBetaNought>
<incidenceAngleForSigma0>Use projected local incidence angle from DEM</incidenceAngleForSigma0>
<incidenceAngleForGamma0>Use projected local incidence angle from DEM</incidenceAngleForGamma0>
<auxFile>Latest Auxiliary File</auxFile>
<externalAuxFile/>
</parameters>
</node>
<node id="Write(3)">
<operator>Write</operator>
<sources>
<sourceProduct refid="Terrain-Correction"/>
</sources>
<parameters class="com.bc.ceres.binding.dom.XppDomElement">
<file>C:\work\result\Cal_TC.dim</file>
<formatName>BEAM-DIMAP</formatName>
</parameters>
</node>
<node id="Write">
<operator>Write</operator>
<sources>
<sourceProduct refid="Calibration"/>
</sources>
<parameters class="com.bc.ceres.binding.dom.XppDomElement">
<file>C:\work\result\Cal.dim</file>
<formatName>BEAM-DIMAP</formatName>
</parameters>
</node>
<applicationData id="Presentation">
<Description/>
<node id="Read">
<displayPosition x="53.0" y="21.0"/>
</node>
<node id="Calibration">
<displayPosition x="151.0" y="21.0"/>
</node>
<node id="Terrain-Correction">
<displayPosition x="127.0" y="144.0"/>
</node>
<node id="Write(3)">
<displayPosition x="274.0" y="142.0"/>
</node>
<node id="Write">
<displayPosition x="267.0" y="20.0"/>
</node>
</applicationData>
</graph>
Processing include :
calibration->Terrain-Correction->
then converting to db (10*log10(Band))
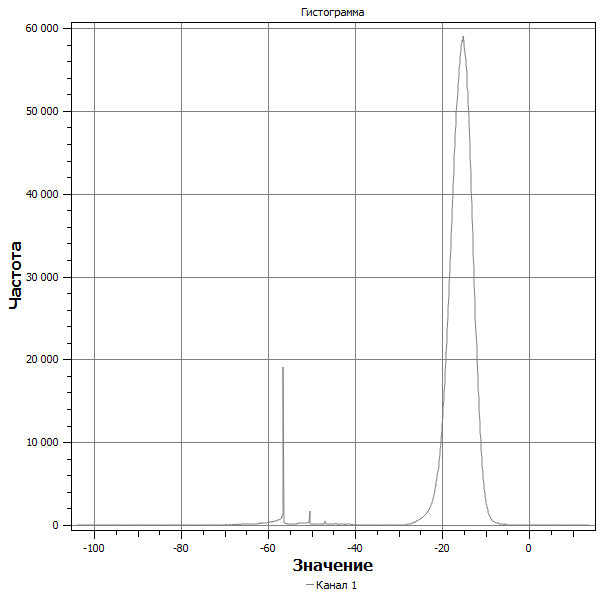
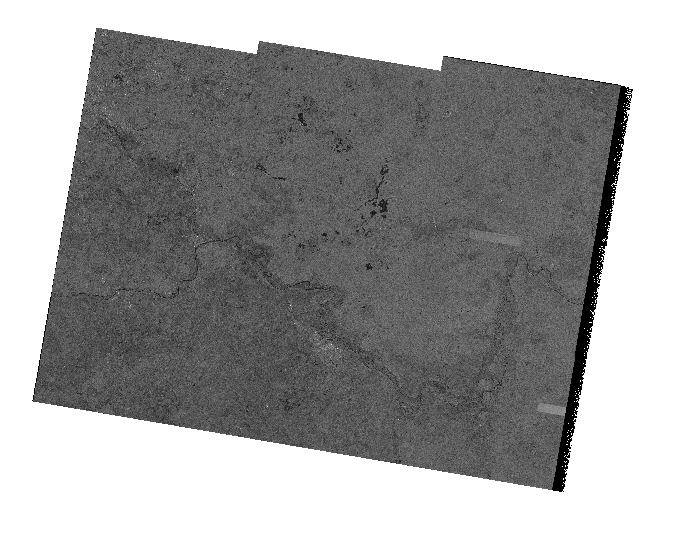
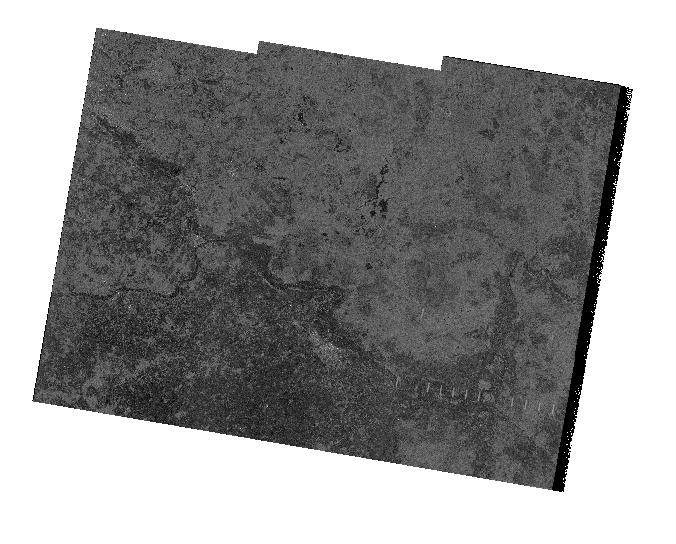
After processing I got 2x sets of images and look at vh polarization.
As I see one image brighter, than other.
Sometimes difference of the pixel’s db values at same pixel more than 10db.(Sometime it’s almost the same)
Difference between mean valuse - 1.827.
gdalinfo return for scene :
2017-05-17:
Minimum=-129.179, Maximum=29.212,
Mean=-16.592,
StdDev=6.615
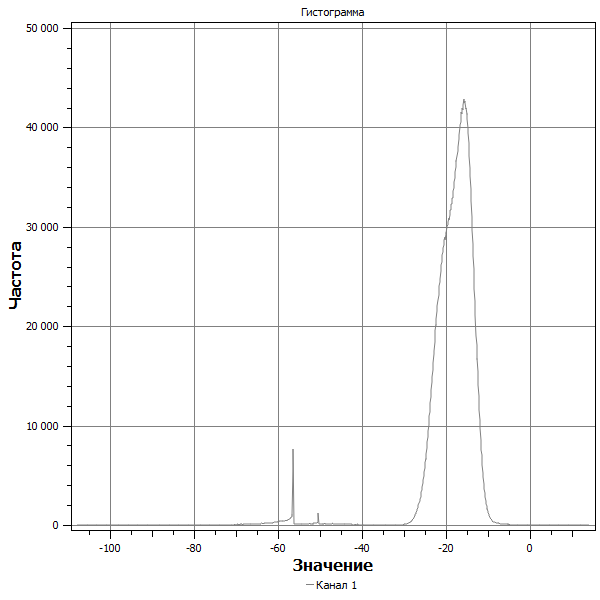
2017-05-05:
Minimum=-142.829,
Maximum=29.058,
Mean=-18.419,
StdDev=6.352
Best regards,
Thanks!