Hi @mengdahl, hi all,
I am trying to correct for terrain using the Terrain Flattening operator and Range Doppler Terrain Correction. However results after Terrain Flattening are highly unsatisfactory (s. Screeshots). I wonder if this is (still) a issue of the algorithm or if there is a way to improve the output.
I´m working on Win10 64bit, Snap 6.0 Beta, Example dataset: S1B_IW_GRDH_1SDV_20170110T095447_20170110T095512_003784_00681B_B4AB.SAFE (Chilean Andes)
I use a gap filled TanDEM-X DEM (doesnt cover the whole radar scene) so I doubt that the issue is within the DEM (Projection UTM 19S, resampled to 10m with bilinear; also tried WGS84 Lat/long).
I applied (and varied) the following pre-processing steps: Thermal Noise Removal >Apply Orbit File > Calibrate to beta > (Subset) > Speckle Filter >Terrain Flattening > Terrain Correction
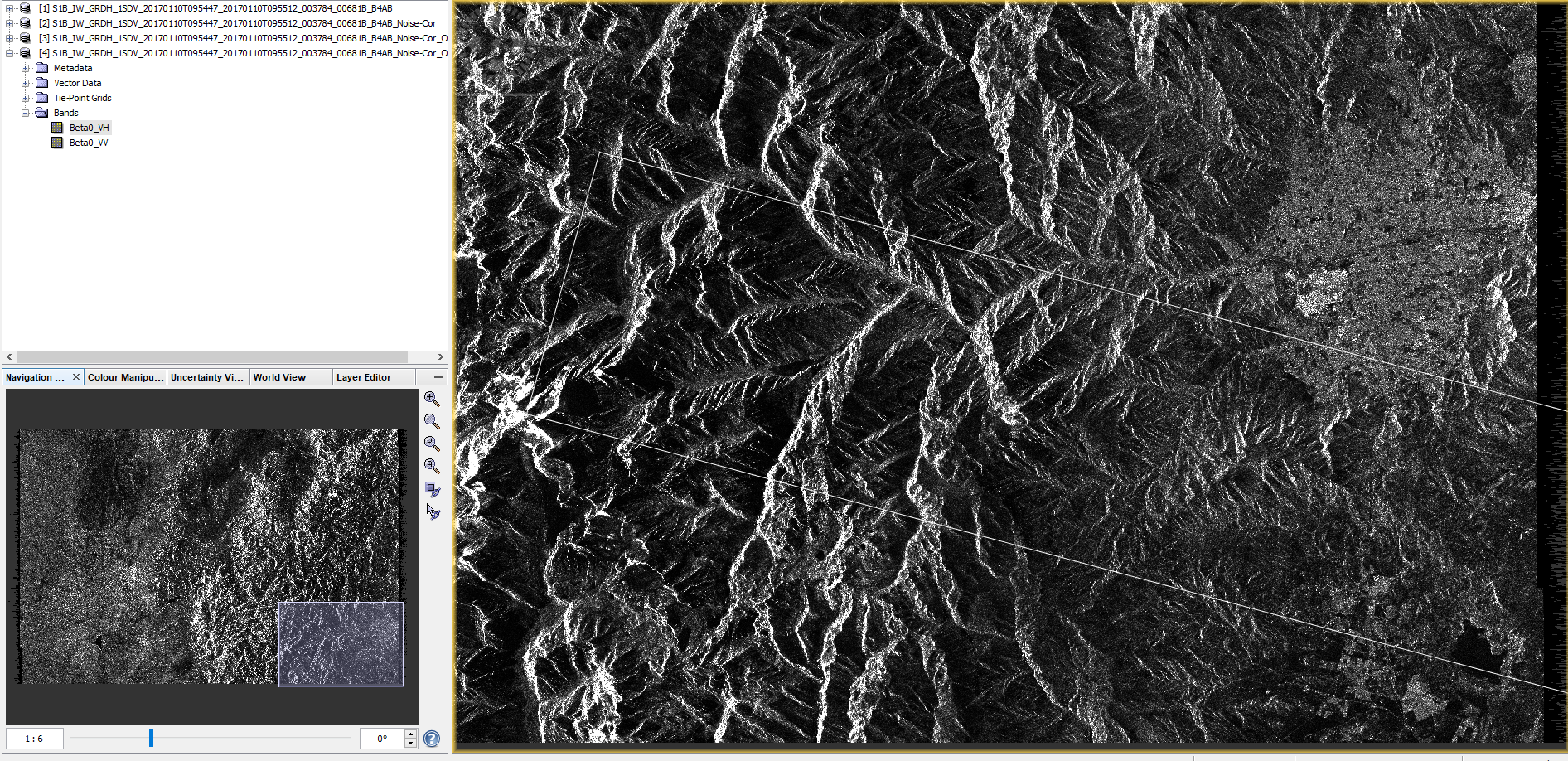
– Calibrated Image –

– DEM (same extent as TC&TF below) –
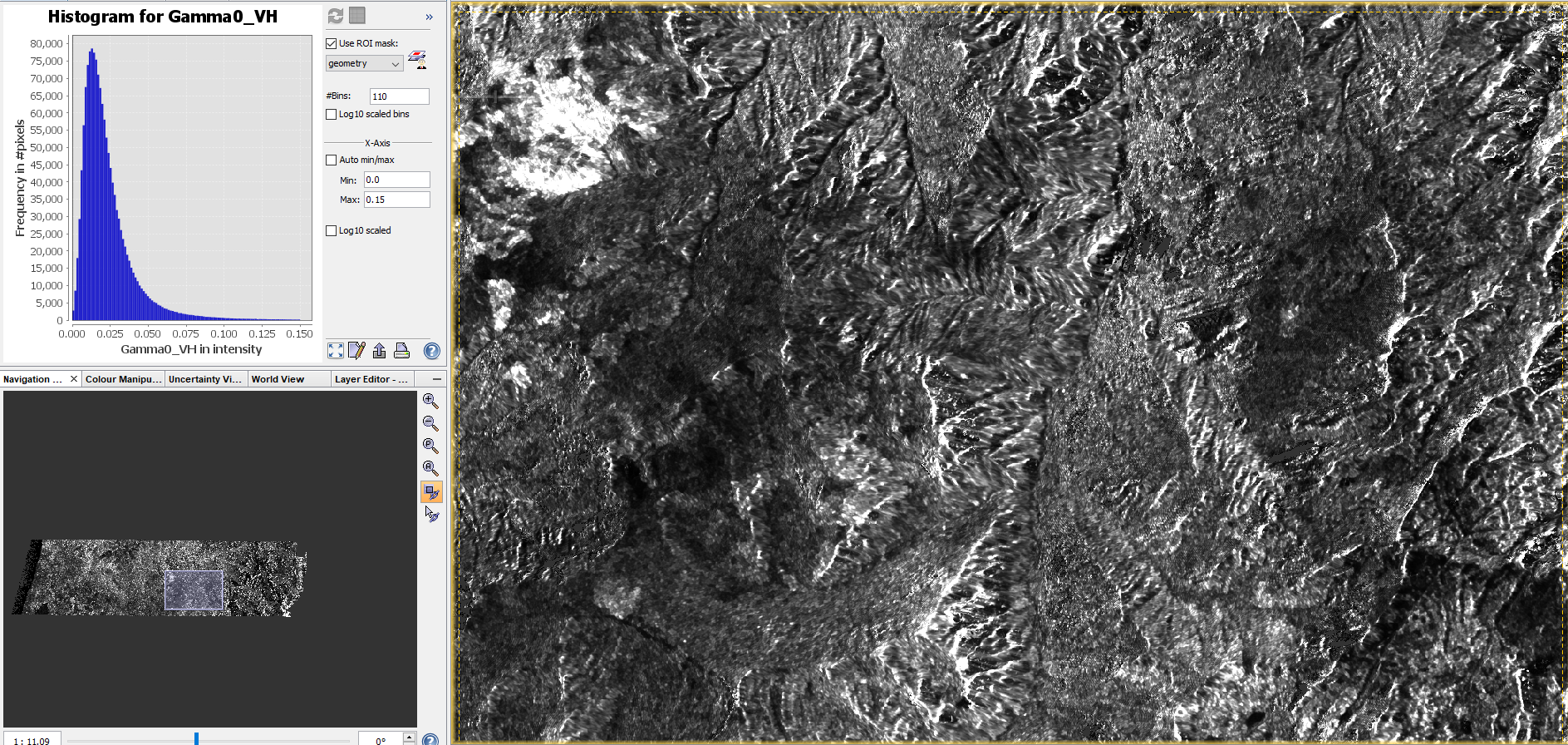
– Terrain Flattened and Terrain Corrected (without additional normalization) –
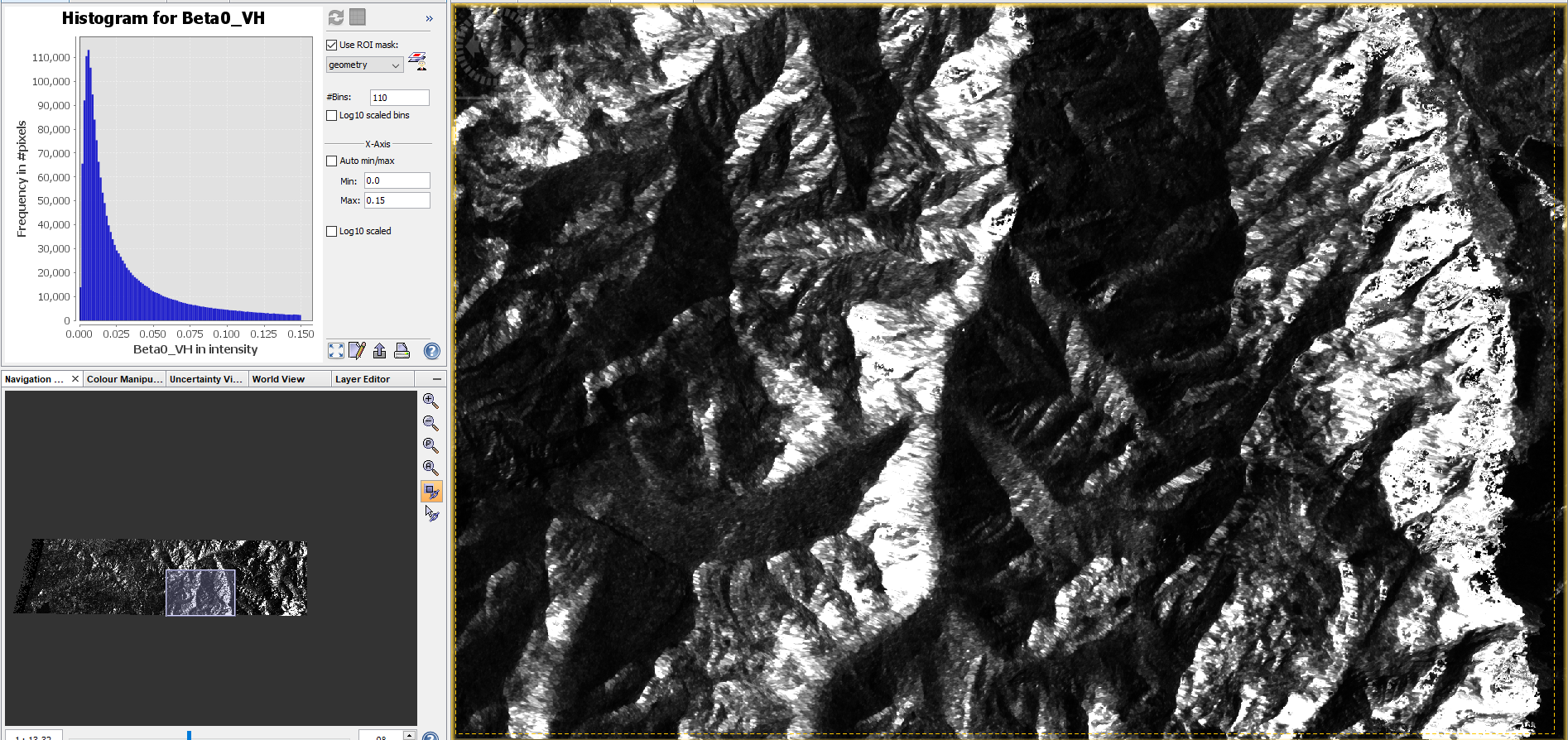
– Terrain Corrected –
Range Doppler with radiometric normalization set performs well in referencing the image to the source DEM but correction for terrain is weak and shadows largely persist (as well as bright areas)
Similar posts:
Best
Chris