Concerning the
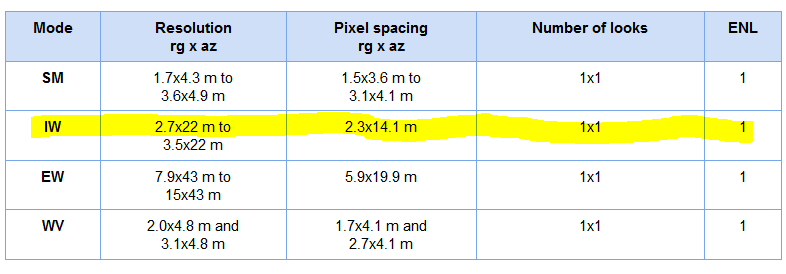
It’s not possible to detect any object within the IW S-1 less than it’s resolution ,
Concerning the coherence and window size,

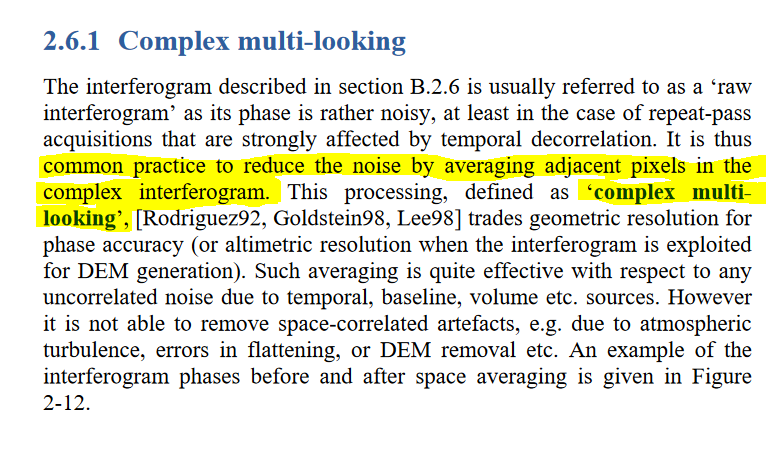
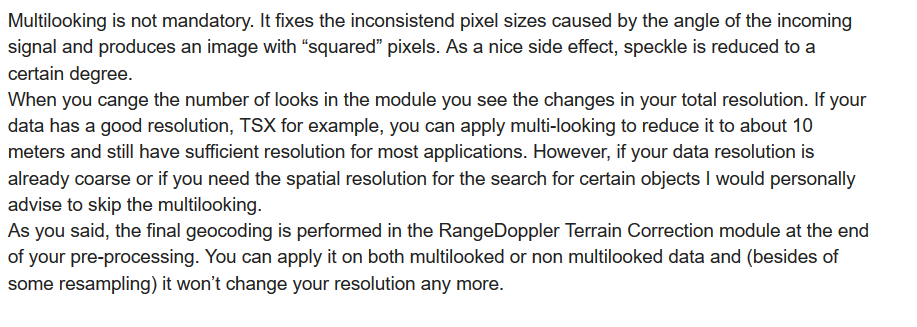
Multi-looking
Concerning the
It’s not possible to detect any object within the IW S-1 less than it’s resolution ,
Concerning the coherence and window size,
Multi-looking