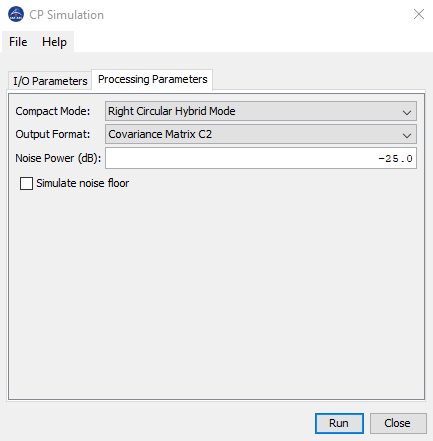
I am trying to simulate compact-pol data from RS2 SLC. From the SNAP help section I understand that the SLC data has to be directly loaded in SNAP and then execute, Polarimetric\Compact Polarimetry\CP Simulation
While doing so I understand that we need to specify the sense of the transmitted polarization but I don’t get how do we decide the Noise Power (dB) and what does it mean to Simulate noise floor.
Also I understand that the Calibration step is included in the CP Simulation. Once the C2 matrix is generated should we either perform Multilooking or Filtering?
For obtaining the Stokes parameters for implementing various decompositions, I understand that the C2 matrix obtained by the above procedure has to be processed further with, Polarimetric\Compact Polarimetry\CP Stokes Parameters
After the Stokes parameters are generated should we then go ahead with the RDTC before performing the decompositions? It will be really helpful to have some clarification on the order of the processing steps and some additional tips.
Since C2 is an incoherent polarimetric representation relating to second order statistics of Jones vector (for partially polarized wave) there is no need to obtain Stokes parameter. You can use directly the the C2 matrix for decomposition purposes.
Alright. But what is the thing with fixing the Noise Power (dB) and simulating a noise floor? On what factors do we decide this value based on the sensor?
Also I notice you have put Speckle Filtering after Decomposition. I perform filtering after Multilooking. I don’t want to do the decompositions on SNAP but just generate the C2 and Stokes parameters and do the rest of the processing myself on Python. So my flow will be,
SLC–Subset–Calibration (complex numbers)–C2 matrix generation–Stokes Parameter–Multilooking–Speckle Filtering–Terrain correction–Read in Python–Further Decompositions and Processing
I see the pros and cons of both approaches, I would probably have directly filtered the C2 matrix. In the slides of Eric Pottier filtering is done before decomposition.
Exactly. Ideally Multilooking should be a parameter during the generation of the C2 matrix and then eventually one can choose to filter. What about the Noise Floor. How does one determines that let’s say for RS2 while simulating CP data?