Hi there,
I’m new on sentinel-3 imagery processing. I am a bit confused by the resolution of Sentinel-3 Level 2 products. In the user guide OLCI has a resolution of 300m, but in the metadata of the nc files of OL_2_WFR and OL_2_LFR the resolution is [270, 294]. Also, the resolution of Synergy products are derived from OCLI and SLSTR (written here), but the metadata of the nc files of SY_2_SYN actually states the resolution as [300, 300] for data derived from OLCI and SLSTR (e.g., Syn_Oa21_reflectance_Data and Syn_S1N_reflectance_Data).
Besides, I’ve seen articles using Ground Sampling Distance and it is defined as the distance between two neighbouring pixel centre. Is is the same as the resolution stated in the metatdata of the nc files of S3 products? I also found Spatial Sampling interval at Sub-satellite point in the specification of OLCI and SLSTR. Does it mean the same thing as Ground Sampling Distance?
They all have different definition but quite similar in some way, and I am totally confused.
For OLCI and many other sensors the resolution or the ground sampling distance is not constant for the whole scene.
The resolution varies across track. At nadir the resolution is roughly 300m, but increases to the edges of the scene due to the view angle.
I tried to depict this in the following scribble.
So generally in this case the provided resolution is an average resolution of the scene, and this value can be different for each scene. Also, the resolution in this case is interchangeable with ground sampling distance, right?
If you have similar scenes, then the resolution will be similar when the pixels are observed under similar angle.
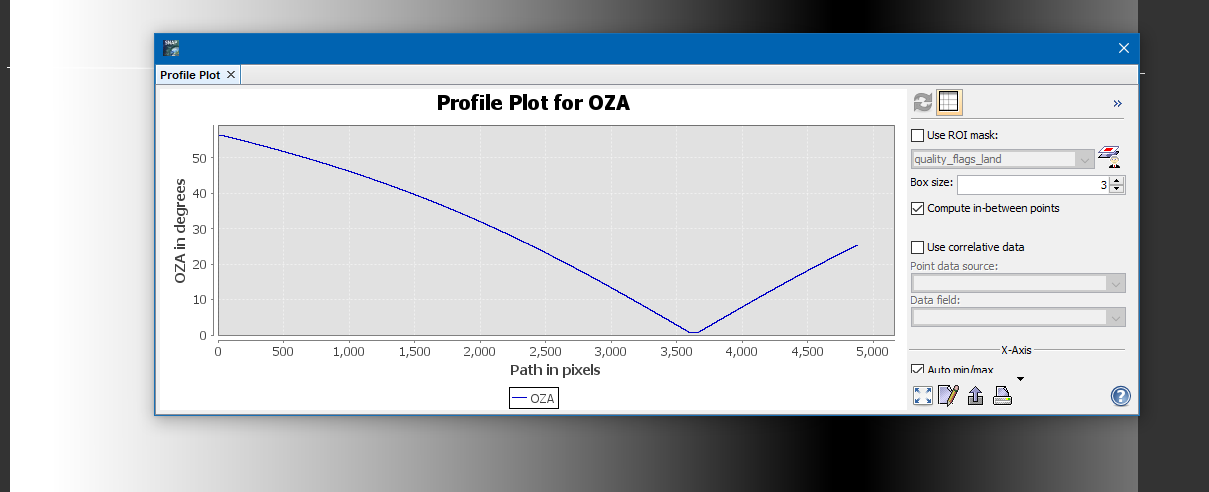
The view angle for OLCI varies between 25°on the right and 56° on the left.
This depicts the angular variation across track.
For most optical sensors the resolution is given for the pixels directly under the track (90 degree viewing angle). Note that the actual contribution from the surface is similar to a 2-D Gaussian “hill”, highest at the centers but a lower weighting as you move away from the center. For ocean areas, land reflectances are usually much higher than water, so near-land pixels often appear overly bright due to high reflectance from areas relativley far from the center overwhelming the lower weighting.
A consequence of the larger ground footprint towards pass edges is that averages of several level-2 images will give high weighting to pixels near the pass edge where the ground footprint covers multiple pixels in the output mapped image. This is doubly nasty because edge pixels tend to be lower quality (due to longer atmospheric path lengths). Level-3 binning was invented to deal with this problem, but simple early implementations often produced Moire patterns. Current level-3 binning can avoid this problem.