I had the same problem,could you tell me how to work it ? thanks in advance.
please have a look at the raster properties and check if there is some logical expression in the “valid pixel expression” which uses a variable, e.g. B2.raw, which no longer exists.
also i had another matter with fusion amd classification,which i need to use the sentinel-1 and sentinel-2 to class the glacier ,and to fusion them to get a better result, what steps should i do ?
what about the steps suggested in this topic?
.first stack the s1 and s2,then class them each other or class s1 and s2 each other and then stack them? which steps ?
I meant that this topic is full of ideas about the fusion of S1 and S2. There are multiple ways to do it, depending on your aim and the type of analysis which is performed. But if you want to perform a supervised classification, a stack containing all input sources is the best choice. Please have a look at these hints: Supervised classification for sentinel 1.
Another option is a principal component analysis or unsupervised classification but both require to scale the input data over the same value range first.
yeah,i need RF classification to work it ,so i need stack s1 and s2 firstly?
yes, stack first.
however the new problem occured,as follow shown:
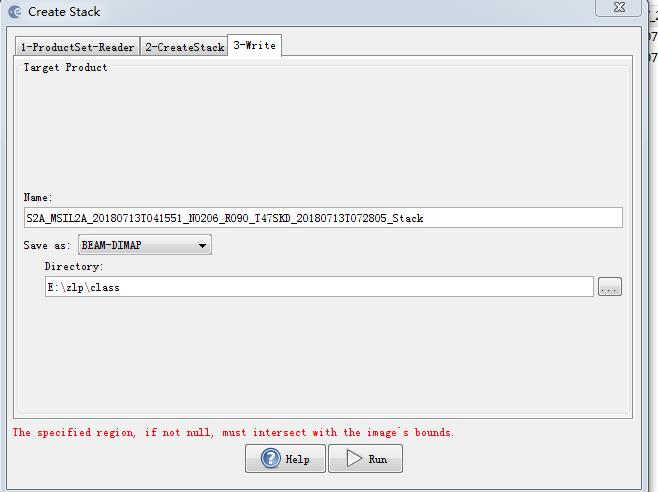
Did you select UTM as coordinate reference system during the Range Doppler Terrain Correction of the Radar image?
the geodetic datum what iused is WGS 1984,and the projection is WGS84,not UTM
then use UTM (Auto) so that both datasets have the same coordinate reference system. SNAP cannot handle to combine two datasets based on different coordinates (metric for UTM and degree for WGS84).
your mean is as follow shown? how to correct it right?
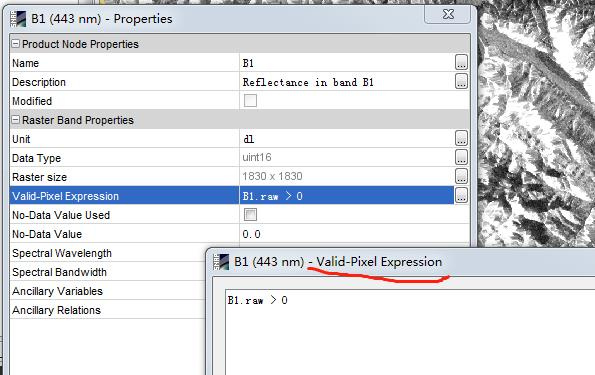
simply delete this term.
fine,thank you very much!
Will it affect the result map projection for UTM, during the Range Doppler Terrain Correction i used the external DEM,which map projection is WGS84 not UTM?
No, SNAP needs the DEM in WGS84, that is fine.
Hi ABraun Sir,
I am using S1(GRD) and S2 data. I want to fuse S1 and S2 data for FLOOD PLAIN MAPPING. I have done the preprocessing steps (Radiometric calibration, Speckle filtering and Range doppler terrain correction(UTM/WGS 84 Automatic, 10m as S2 data)) for S1 data. From the above conversations I understood that the next step is Collocation>Create RGB>Fusion.
But Im confused of these steps. For fusion what is the procedure to process the S2 data? What should I do first with my S2 data?
In which method I want to fuse S1 with S2?
Please tell me the step by step procedure for fusion.
S2 is already stored in UTM so you just check which UTM zone is present and select the same UTM zone for the Range doppler Terrain Correction of Sentinel-1, so both have the same coordinate reference system.
S2 is stored in different resolutions, so your first step should be the S2 Resampling operator. After that you can apply a subset (if needed) and input both products (resampled S2 and terrain corrected S1) in the Collocation operator.
It depends on what kind of fusion you want to proceed with. RGB is a visual fusion, but you can also apply a PCA on the stack or use it as training input of a (un)supervised classification. There are many ways to make use of both the optical and radar information but in SNAP, the First step is to put both into one common product (=stack).
Ok sir. Thank you very much!
But, for resampling which bands of S2 I should choose?
If I need RGB bands, they are already in 10m resolution. Then why should I do resampling?
For Flood plain mapping which fusion method is best suited?