Please help me out with Sentinel attitude parameters from the raw data. The question is what reference systems attitude quaternions (and angular velocity vectors) relate to? According to my readings, it may be assumed that quaternion sets the SRF attitude with respect to ZDORF, but this suggestion is inconsistent with the data.
I too am having issues resolving how to use the Level-0 attitude quaternions along with the position and velocity to get an accurate look vector. Taking the cross product between the ECEF position vector and the ECEF velocity vector (directly from the S/C Attitude Ancillary Data Table in the “Sub-commutated Ancillary Data Service” field of the Packet Secondary Header) yields a very poor estimate of look direction. Clearly, the attitude is required to get an accurate look direction. Trying to use the EOCFI C functions presents its own challenges because of how they change the quaternion order along with other fields and have certain data formating expectations in the code.
I strongly encourage you to look at the published Level-1 algorithm document. I have tried to implement the equations from the Sentinel-1-Level-1-Detailed-Algorithm-Definition.pdf file from section “5.1 Absolute DC Calculation (from Orbit & Attitude)” where they show how to compute u0 from position, velocity, and attitude - but I suspect this document assumes a conversion of the attitude values to something other than those of the Level-0 Sentinel-1-SAR-Space-Packet-Protocol-Data-Unit.pdf documentation. I think the cross product of position and u0 should be a pretty good look direction estimate.
I don’t see any other posts on this topic (except my own), so either everyone else understands it (and won’t respond/educate us) or no one else is doing this type of processing. Hard to know. If I find anything, I’ll follow up both in my posts and here…
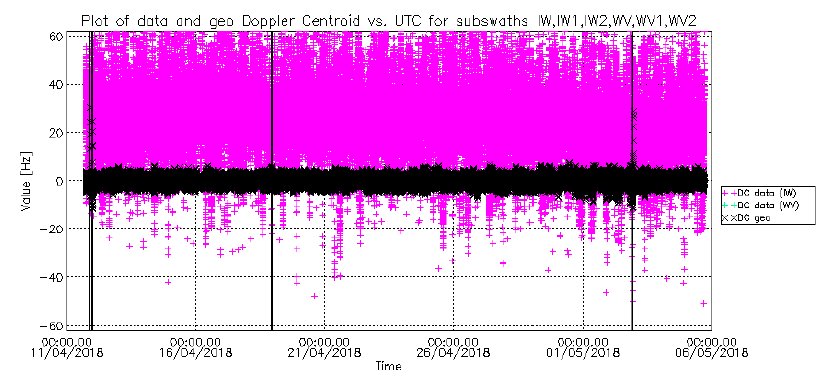
Hi, As I believe has already been mentioned on this Forum, the S1 quaternions do not give a good indication of the actual attitude of the satellite. This is illustrated below which shows the Doppler extracted using the quaternions (in black) and from the actual data (purple). So if you wish to determine the Doppler for SAR processing, derive it from the data itself and not from the quaternions.
Thank your for your response. It seems like Centroid indeed should be derived from the SAR data. Additionally I would like to ask a related question. Where can I get a beam scanning velocity in IW mode?
Hi, there are two parameters that describe the antenna steering - the Antenna Steering rate and the Doppler Centroid rate introduced by the scanning of the antenna. These parameters and how to extract/derive them are described in the following ESA document: https://sentinel.esa.int/documents/247904/1653442/Sentinel-1-TOPS-SLC_Deramping.
1 Like
Thank you, this is exactly what I was looking for.
Hi, A slightly updated version of the document I mentioned earlier today is now on-line at https://sentinel.esa.int/documents/247904/1653442/Sentinel-1-TOPS-SLC_Deramping.