Other than the spatial resolution difference, which one should I really use while back geocoding? my study area is in the Middle East
![]()
both cover the Middle East, and for BackGeocoding the difference is probably minor. But general, SRTM 1Sec has a spatial resolution of 30m and SRTM 3Sec has a spatial resolution of 90 m, so the first is more accurate which is especially contributing to a correct geometric calibration during the Range Doppler Terrain Correction.
4 Likes
Does SRTM 1Sec cover South Asia?
yes, please check here: https://www2.jpl.nasa.gov/srtm/coverage.html
3 Likes
Just a small comment.
One may try Radiometric Terrain Corrected products from ASF where for some areas there are 12.5 DEM included in the bundle. Not sure of there will be improvements, but it is worth test the option.
the pixel spacing is 12.5 m, but most of the products originate from SRTM.
As shown in their table, only US territories and Alaska are based on NED which is below 30m. The rest is just resampled but without increase of quality.
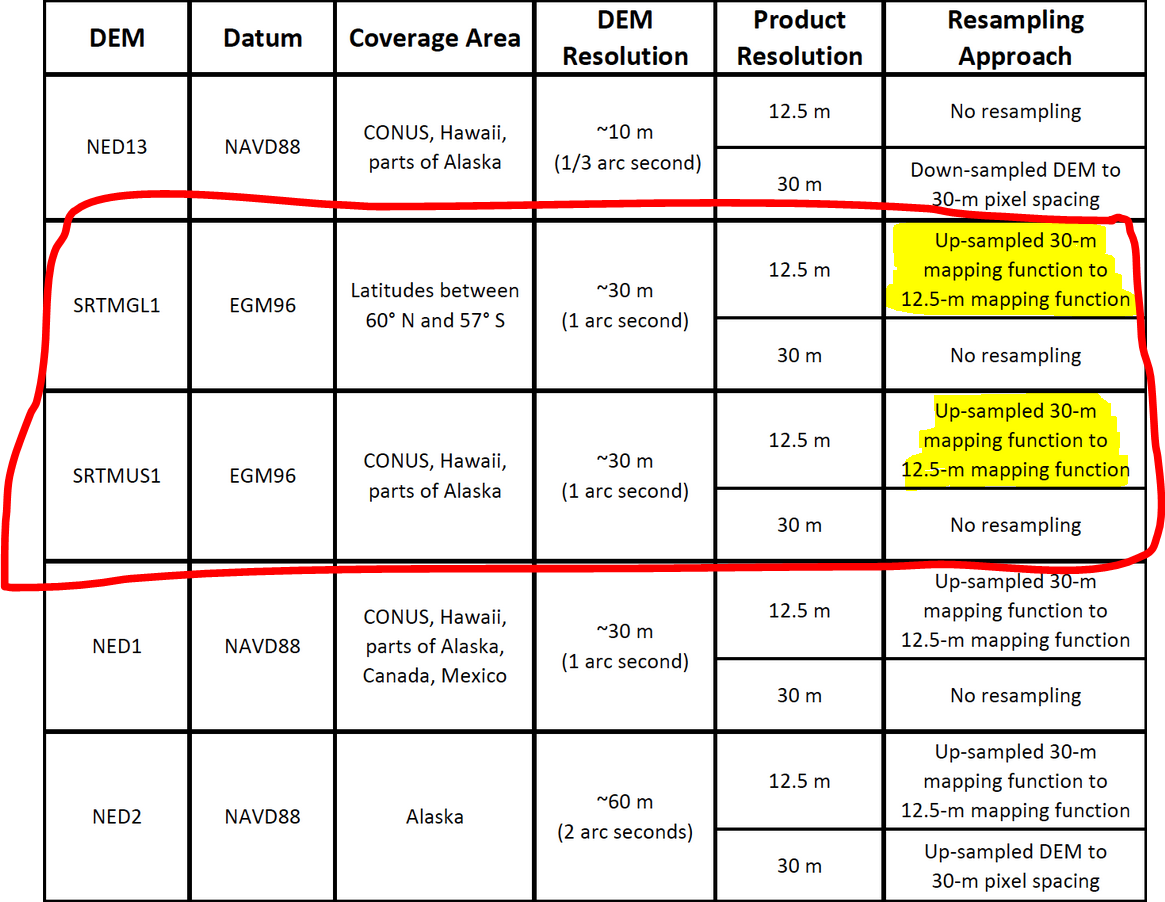
source: https://asf.alaska.edu/data-sets/derived-data-sets/alos-palsar-rtc/alos-palsar-radiometric-terrain-correction/
1 Like
Poor resolution DEMs are perfectly fine for co-registration - using a better DEM brings no benefit.
2 Likes
Would it be possible to have an explanation or a link provided to explain why this is the case? Is there any advantage to using SRTM over ASTER GDEM Version 3 (New Version of the ASTER GDEM | Earthdata), for example? The ASTER GDEM is at a finer resolution, but the choice seems arbitrary based on your answer. Is there a case where one type of DEM would be preferred over the next in the co-registration process that may impact downstream analysis? It makes sense to me why co-registration would not matter, but (if I understand this correctly) could there be an issue if you are subsequently projecting the results of separate sub-swaths and and scans (one set co-registered with SRTM and the 2nd with ASTER GDEM)?
Here is a short but not complete list of how DEMs impact SAR/InSAR processing. Depending on your application, the resolution/posting your analysis is to be performed at and tolerance for error, you can choose the appropriate DEM for your work.
- Absolute geolocation:
Geolocation error due to a height error in the DEM goes roughly as height_err/cot(incangle). If you have a height error in the DEM, same pixel will be geolocated differently (EW shift) in different tracks. This has an impact on co-registering imagery from different tracks - especially ascending vs descending passes.
- Relative geolocation
Relative geolocation of a pixel between images acquired from same imaging geometry (track) is same as the InSAR phase relationship to height (order of cm). A height error in the DEM almost has almost no impact but a small sub-pixel shift (cm order error vs few meters order pixel spacing which may not even be discernible in co-registration of images acquired from the same track). This is why for InSAR (especially with small baselines like S1, choice of DEM for coregistration doesn’t matter much unless you are in really rugged terrain). In this case, stack of images from same track will be relatively well coregistered to each other but imagery from different tracks could be shifted due to the height error (see absolute geolocation above).
The height error also introduces a slight systematic phase component to flattened phase in interferograms, which are estimated out by InSAR time-series techniques.
- Random height error / pixel-by-pixel error/DEM slope error
When performing RTC, random height error leak into your correction factors. This error term could introduce more scatter in the data when you apply RTC independently to images from the same track compared to just coregistering the imagery without terrain correction (beta0,E / sigma0,E). You can control the effect of this component by coregistering the imagery first and then applying same RTC correction approach consistently to all of them. DEMs derived using InSAR like SRTM / Copernicus DEM tend to have less random height error (or scatter) than ones derived using optical techniques like GDEM. A higher resolution DEM does not necessarily mean improved slope accuracy, and that could make RTC noisier.
4 Likes
For co-registration a better DEM brings no benefit if co-registration works with the lower quality DEM. For terrain correction the best available DEM should always be used.
I found that Copernicus30 is the best DEM for performing Range-Doppler Terrain Correction. It always gives you around 3-5% better R2 of correlation with any measured field variables by the comparison if SRTMs are used for RDTC.
1 Like
Thank you for sharing your experience. What variables did you predict to calculate R² and what was the input data? Was the increase in R² caused by better geolocation of the predicted pixels or was the DEM itself involved in the prediction of your target variable?
All kinds of measured field variables of various crops: height, crop coefficient, LAI, correlation with optical vegetation indices, soil moisture. I assume DEM affects the radiometric properties of the pixels. Geolocation is not the case because in all cases, I analyzed huge amounts of imagery and large polygons with the offsets from roads and other features not related to the measured variables. DEM was used only for Range-Doppler, not for analysis anyhow. The correlation was done very straightforward - backscatter from polygon (various VV and VH combinations) vs. measured variable.
Gregoriy Kaplan is me:)
1 Like
Very interesting, thank you.
1 Like
Hello @mengdahl, would it be okay to use two different DEMs, one for co-registration (with lower resolution) and another with better resolution for terrain corrections, from different dates? Thanks for any help!
What if I decided to use an external DEM for co-registration to have the ability to mask water bodies before the back-geocoding and interferogram formation process as they introduce a lot of noise and unfortunately the coherence values of water bodies are relatively close to low-coherence areas of land which I do wish to include in the interferogram, is this possible to do on SNAP?
Which format of external DEM is readable by SNAP ?
What is the difference between SRTM DEM that was created using C-Band Space-borne imaging Radar and the DEM that can be created from Sentinel-1 Interferometric pairs? I mean, which is more preferable to use for DInSAR processing chain?