I was running coherence estimation routine and then created graph in order to automate this process. What was first a random discovery, now seems to be inconsistency. I did not manage to get the exact raster dimensions and geocoordinates out of the results produced manually in GUI and the one by GPT. I went through a lot of the posts to understand the pixel spacing settings. For GPT graphs it has to be 0.0 so the results are always mirroring the specific input. Then I tried to figure out where do the numbers come from in manual UI processing, since there are always precalculated pixels spacing in meters and degrees supplied in the view. What I found out that there are two entities that calculate this.
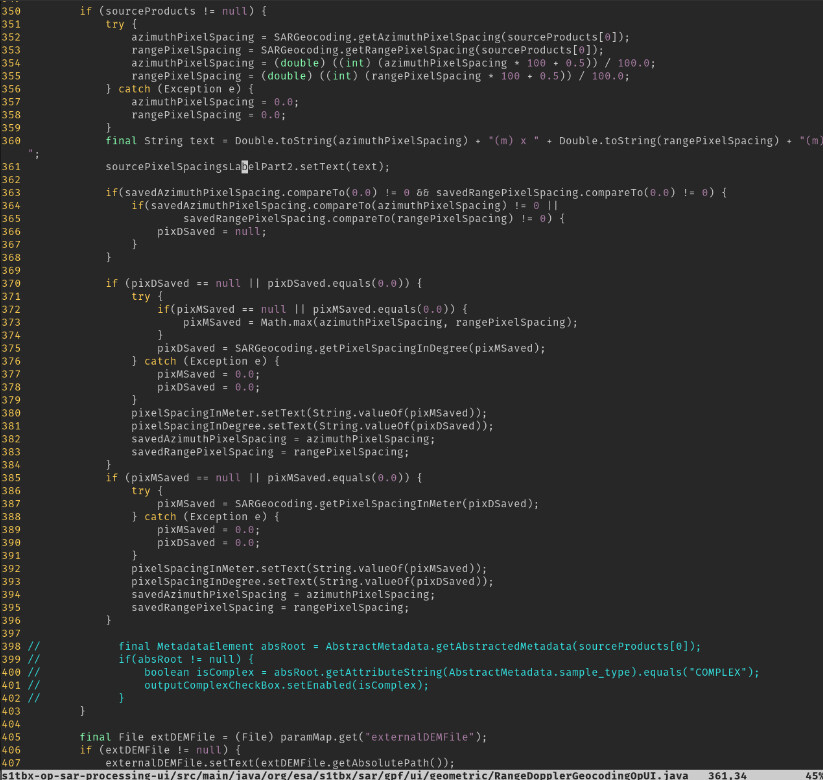
RangeDopplerGeocodingOpUI.java (triggered when operator parameters and configuration are opened in manual UI processing)
RangeDopplerGeocodingOp.java (triggered when there are 0.0 values supplied in the manual UI or GPT)
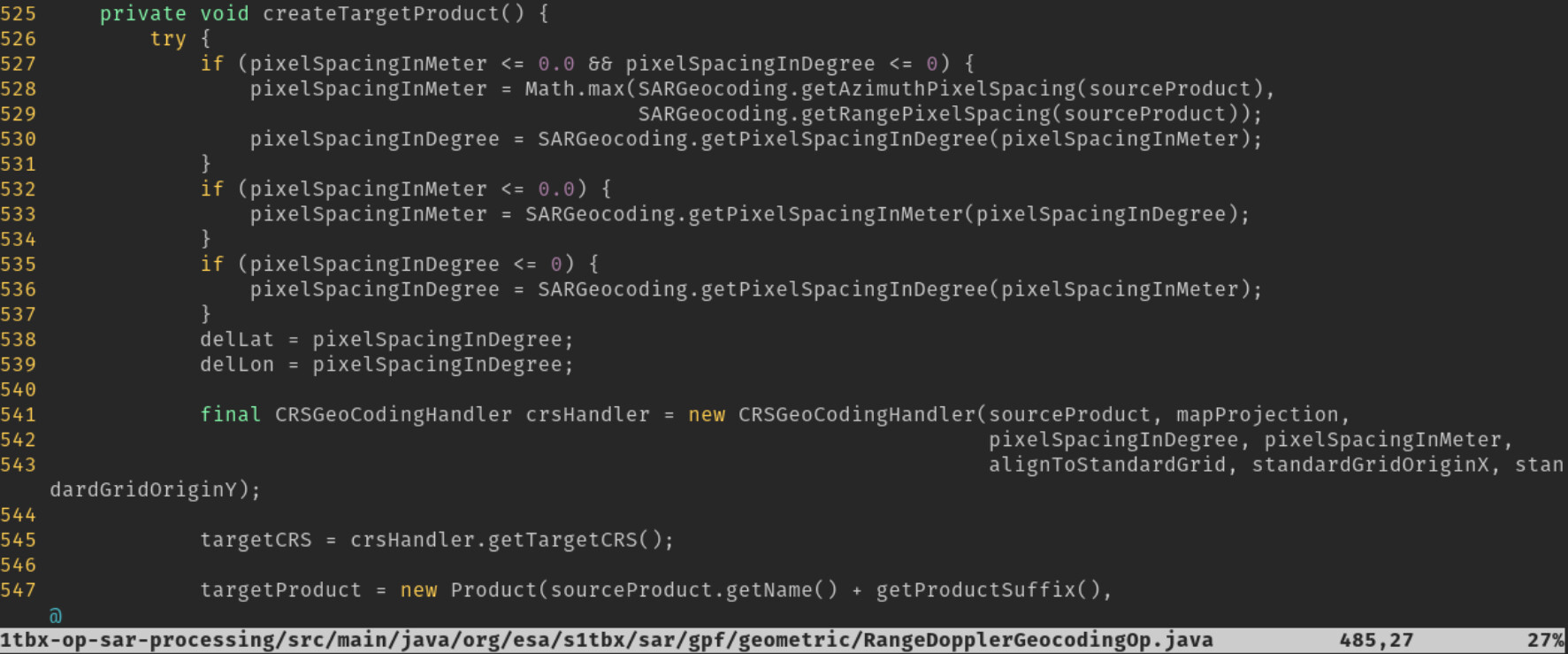
As can be seen on the screenshots there are different methods to calculate spacing for the terrain corrected output. Since these also influence geocoordinates I would like to understand, are they both correct (since couple of pixels difference is not that big deal) or one should be preferred over another?